Weźmy pod uwagę zespół hamowania jazdy żurawia samojezdnego. Składa się on z hydraulicznego układu hamowania 1 i hamulca ręcznego 2. Przyjmijmy najpierw jako kryterium niesprawności zespołu hamowania fizyczny i umowny brak możliwości hamowania, przy czym niesprawność fizyczna oznacza brak możliwości hamowania w ogóle, a niesprawność umowna to taka zmiana stanu technicznego zespołu, która nie przerywa wprawdzie funkcjonowania tego zespołu, ale znacznie zwiększa ryzyko powstania niesprawności fizycznej. Niesprawnością umowną zespołu hamowania jest więc na przykład niesprawność hamulca ręcznego, nawet przy prawidłowo działającym hydraulicznym układzie hamowania. Przy takiej definicji niesprawności zespołu hamowania ma on strukturę szeregową w sensie niezawodności (rys.4a). Jeżeli jednak przyjąć, że niesprawnością zespołu hamowania jest każde zdarzenie uniemożliwiające fizyczne jego funkcjonowanie, to zespołowi temu należy przypisać strukturę złożoną z elementu podstawowego (hydrauliczny układ hamowania) i z elementu stanowiącego rezerwę nieobciążoną (hamulec ręczny) (rys.4b).
- a) b)
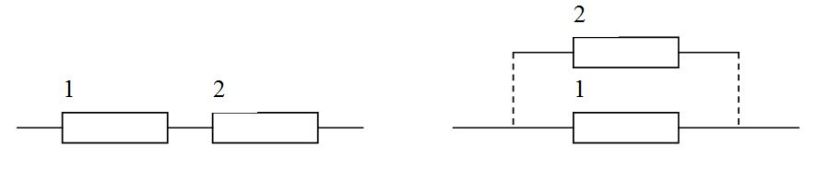
Rys. 2. Modele struktury niezawodnościowej zespołu hamowania [24]
Jak wynika z tych rozważań, możliwe są różne definicje opisowe niesprawności obiektu złożonego z wielu PK (więcej niż 1). Każdej z tych definicji może odpowiadać nie tylko inna struktura niezawodnościowa, lecz również inne zbiory PK i kryteriów ich niesprawności. Zatem ustalenie definicji niesprawności obiektu złożonego i wielu PK i dokładne określenie kryteriów niesprawności, precyzujących tę definicję, ma bardzo duże znaczenie w procesie tworzenia niezawodnościowego modelu tego obiektu.
Nie ma, niestety, ogólnie obowiązujących reguł, które pozwalałyby do konkretnego obiektu dobierać odpowiednią definicję niesprawności. Wydaje się, że podstawą tego wyboru, a więc również wyboru struktury niezawodnościowej, może być na przykład analiza najważniejszych czynników mających wpływ na ten wybór:
- rodzaju zadań przewidzianych do wykonania przy użyciu tego obiektu (lub maszyny zawierającej ten obiekt);
- sposobu eksploatacji;
- możliwości powstania dużych strat ekonomicznych i możliwości zagrożenia dla życia ludzkiego w przypadku powstania niesprawności.
Wykażmy na przykładach wpływ każdego z nich na wybór kryteriów niesprawności obiektu.
Najważniejszym kryterium oceny obiektów, przy użyciu których są wykonywane szczególnie odpowiedzialne zadania, jest skuteczność wykonania tych zadań. Znacznie mniej ważne są inne kryteria, np. koszty związane z funkcjonowaniem obiektu. Przykładem takiego obiektu może być żuraw samojezdny w warunkach wojny. Wówczas na skuteczność działania przy użyciu takiego obiektu ma duży wpływ zdolność nieulegania niesprawnością fizycznym. W takich przypadkach może być uzasadnione pomijanie w definicji niesprawności innych zdarzeń.
Duży wpływ na sformułowanie definicji niesprawności ma również sposób eksploatacji. W przypadku obiektów jednorazowego użytku lub obiektów funkcjonujących w sposób ciągły, tzn. bez planowanych przerw w pracy, pojęcie niesprawności umownych traci sens, bo nie ma okazji do ich usunięcia. Do takich obiektów nie mogą więc być dobierane takie definicje, jak na przykład podana powyżej definicja.
Szczególnie duży wpływ na wybór kryteriów niesprawności może mieć trzecia grupa czynników. Możliwość powstania dużych strat ekonomicznych i szczególnie dużych strat społecznych, jakimi są utrata życia lub zdrowia ludzkiego, związana jest z rodzajem zadania wykonywanego przy użyciu rozpatrywanego obiektu. W tych przypadkach ma sens wyróżnianie niesprawności umownych, bo ich usuwanie może zmniejszać ryzyko powstania tych strat.
W wyniku przedstawionego w tym podrozdziale postępowania, przebiegającego w wymienionych czterech etapach, powstaje nominalny model niezawodnościowy obiektu. Na model ten składają się: opis procesu eksploatacji (lub zewnętrznych oddziaływań), opis zjawisk fizycznych przebiegających w poszczególnych PK, zbiór definicji i kryteriów niesprawności poszczególnych PK i całego obiektu, opis słowny lub graficzny (np. w postaci przedstawionej na rys.4) struktury niezawodnościowej.
W celu umożliwienia badań teoretycznych informacje zawarte w modelu nominalnym w postaci opisu słownego i graficznego należy przedstawić za pomocą opisu matematycznego. Dokonuje się tego w następnym etapie modelowania, tzn. w etapie budowy modelu matematycznego.